ZLTECH Nema23 מקודד CANopen מנוע צעד-סרוו משולב










מאפיין מוטורי משולב
1. החיווט מפושט.
בקרת תקשורת אוטובוס CANopen, ניתן לחבר מנועים מרובים דרך יציאת תקשורת אוטובוס אחת, ורק צריך לחבר את הדרייברים זה עם זה כדי להפחית את עומס העבודה בחיווט.
2. מהירות התקשורת מהירה.
מאומץ מצב תקשורת טורית כפול.מדיום התקשורת יכול להיות זוג מעוות, כבל קואקסיאלי או סיב אופטי, וקצב התקשורת יכול להגיע ל-1mb/s.
3. דיוק שידור גבוה, אמינות גבוהה ויכולת אנטי-הפרעות חזקה יותר.
מבנה המסגרת הקצר מאומץ.מספר הבתים האפקטיביים בכל מסגרת הוא 8. 8 הבתים לא יתפסו את האוטובוס יותר מדי זמן, ובכך יבטיחו את התקשורת בזמן אמת.ההסתברות להפרעות נמוכה יותר, וזמן השידור החוזר קצר יותר.
4. עלות נמוכה וישימות גבוהה.
ניתן לראות את מודול CANOPEN בעלות נמוכה כמעט על השבבים הפופולריים של היום.רוב ה-MCUs תומכים בציוד היקפי CAN, הידוע גם כמודול ה-fieldbus הנפוץ ביותר באירופה ובמדינות אחרות.
5. מנגנוני הטיפול והגילוי בשגיאות אמינים.
במקרה של שגיאה חמורה, לצומת יש את הפונקציה של יציאה אוטומטית מהאוטובוס.לאחר שהמידע שנשלח פגום, ניתן לשדר אותו אוטומטית מחדש.בדיקת CRC מאומצת ופונקציית טיפול השגיאות המתאימה מסופקת כדי להבטיח את האמינות של תקשורת נתונים.
פרמטרים
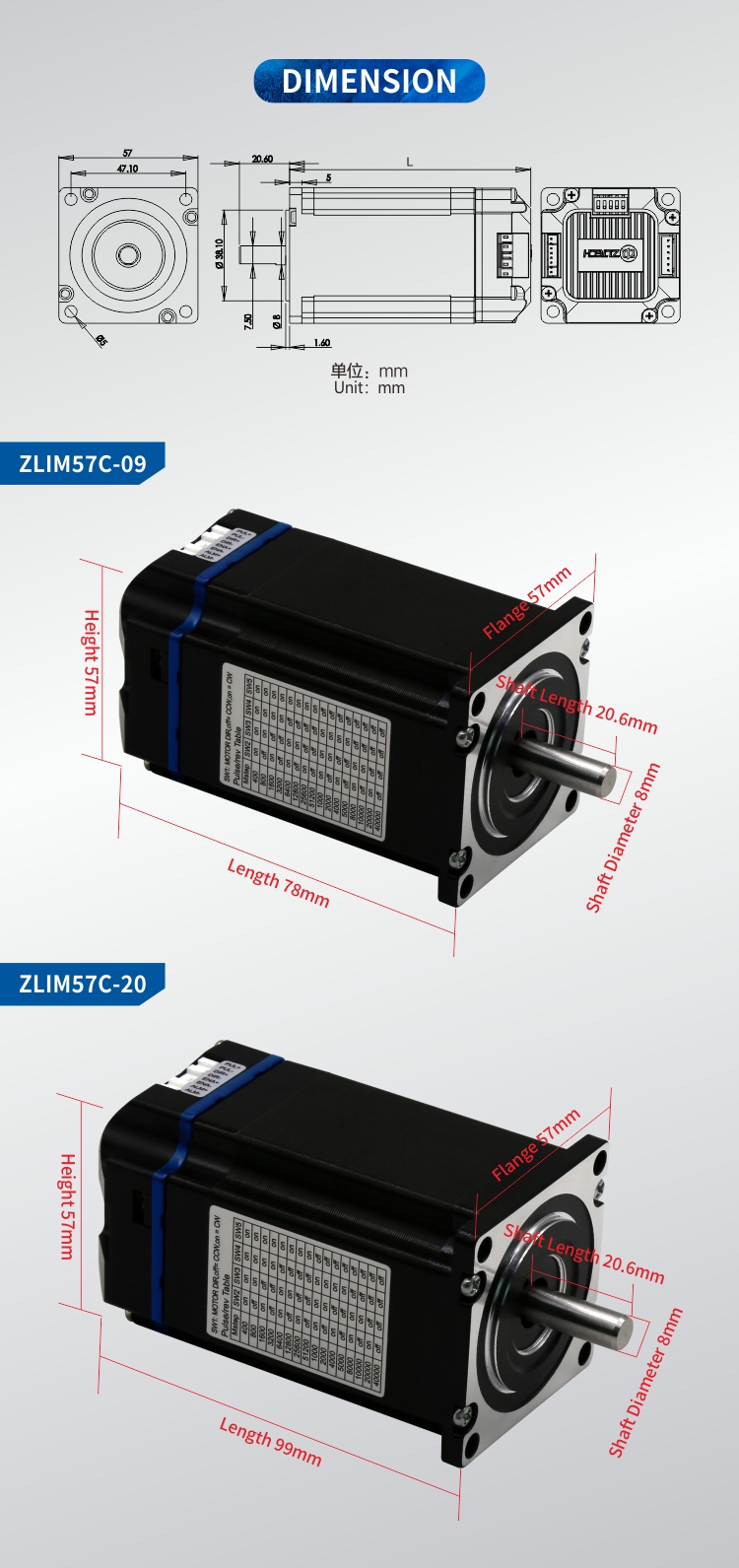
| אורך מנוע כולל (מ"מ) | 99.1 | 120.1 |
| יכול לפתוח | ZLIM57C-09 | ZLIM57C-20 |
| פיר | פיר בודד | פיר בודד |
| גודל | נמה23 | נמה23 |
| זווית צעד | 1.8° | 1.8° |
| מתח כניסה (VDC) | 18-28 | 18-28 |
| שיא זרם פלט (A) | 3 | 3 |
| תדר אות צעד (הרץ) | 200 אלף | 200 אלף |
| זרם כניסה של אות בקרה (mA) | 10 | 10 |
| הגנת מתח יתר (VDC) | 55 | 55 |
| מתח אות כניסה (VDC) | 5 | 5 |
| קוטר פיר (מ"מ) | 8 | 8 |
| אורך פיר (מ"מ) | 20.6 | 20.6 |
| מומנט החזקה (Nm) | 0.9 | 2 |
| מהירות (RPM) | 2000 | 2000 |
| קוֹדַאִי | / | / |
| התנגדות בידוד (MΩ) | 100 | 100 |
| טמפרטורת שירות (℃) | 0~50 | 0~50 |
| מקסימוםלחות הסביבה | 90% RH | 90% RH |
| טמפרטורת אחסון (℃) | -10~70 | -10~70 |
| רֶטֶט | 10~55Hz/0.15mm | 10~55Hz/0.15mm |
| משקל (ג) | 1130 | 1130 |
| אורך מנוע (מ"מ) | 78.5 | 99.5 |
| אורך מנוע כולל (מ"מ) | 99.1 | 120.1 |
| קוֹדַאִי | / | / |
מֵמַד
יישום

אֲרִיזָה

מכשיר ייצור ובדיקה

הסמכה והסמכה

משרד ומפעל
שיתוף פעולה

קטגוריות מוצרים
-

ZLTECH 24V-48V 10A Modbus RS485 DC ללא מברשות מו...
-

ZLTECH 57mm Nema23 24VDC 1000-wrie לולאה סגורה ...
-

ZLTECH 24V-48V 30A Modbus RS485 DC ללא מברשות דר...
-

ZLTECH 2 phase Nema23 24-36VDC לולאה סגורה שלב...
-
ZLTECH Nema17 42mm 2 phase 0.72Nm dc 24V 2A st...
-

ZLTECH דו פאזי Nema34 4.5Nm 24V dc מנוע צעד ...





