ZLTECH 24V-36V 5A DC חשמלי Modbus RS485 בקר נהג מנוע ללא מברשות עבור AGV


















תפקוד ושימוש
1 מצב התאמת מהירות
ויסות מהירות כניסה חיצונית: חבר 2 מסופים קבועים של הפוטנציומטר החיצוני ליציאת GND ויציאת +5v של הנהג, בהתאמה.חבר את קצה הכוונון לקצה SV כדי להשתמש בפוטנציומטר החיצוני (10K~50K) כדי לכוונן מהירות, או דרך יחידות בקרה אחרות (כגון PLC, מיקרו-שבב יחיד וכן הלאה) מתח אנלוגי קלט לקצה SV כדי לממש ויסות מהירות (ביחס ל-GND).טווח מתח הקבלה של יציאת SV הוא DC OV עד +5V, ומהירות המנוע המתאימה היא 0 למהירות מדורגת.
2 בקרת הפעלה/עצירה של מנוע (EN)
ניתן לשלוט בהפעלת המנוע ובעצירתו על ידי שליטה בהפעלה וכיבוי של המסוף EN ביחס ל-GND.כאשר המסוף מוליך, המנוע יפעל;אחרת המנוע יפסיק.כאשר משתמשים במסוף ההפעלה/עצירה לעצירת המנוע, המנוע ייעצר באופן טבעי, וחוק התנועה שלו קשור לאינרציה של העומס.
3 בקרת מנוע קדימה/אחורה (F/R)
ניתן לשלוט בכיוון הריצה של המנוע על ידי שליטה בהפעלה/כיבוי של מסוף F/R ומסוף GND.כאשר F/R והמסוף GND אינם מוליכים, המנוע יפעל בכיוון השעון (מצד פיר המנוע), אחרת, המנוע יפעל נגד כיוון השעון.
4 כשל במנהל ההתקן
כאשר מתח יתר או זרם יתר מתרחשים בתוך הנהג, הנהג יכנס למצב הגנה ויפסיק לפעול באופן אוטומטי, המנוע יפסיק, והאור הכחול על הנהג ייכבה.הנהג ישחרר את האזעקה כאשר מסוף ההפעלה מאופס (כלומר, EN מנותק מ-GND) או כבוי החשמל.כאשר תקלה זו מתרחשת, אנא בדוק את חיבור החיווט עם עומס המנוע או המנוע.
5 יציאות תקשורת RS485
מצב התקשורת של הנהג מאמץ פרוטוקול Modbus סטנדרטי, התואם את התקן הלאומי GB/T 19582.1-2008.תוך שימוש בתקשורת קישור טורית דו-חוטי מבוססת RS485, הממשק הפיזי משתמש ביציאת חיווט קונבנציונלית בעלת 3 פינים (A+, GND, B-), והחיבור הטורי נוח מאוד.
פרמטרים
| נהג | ZLDBL4005S |
| מתח כניסה (V) | 24V-36V DC |
| זרם פלט (A) | 5 |
| דרך שליטה | Modbus RS485 |
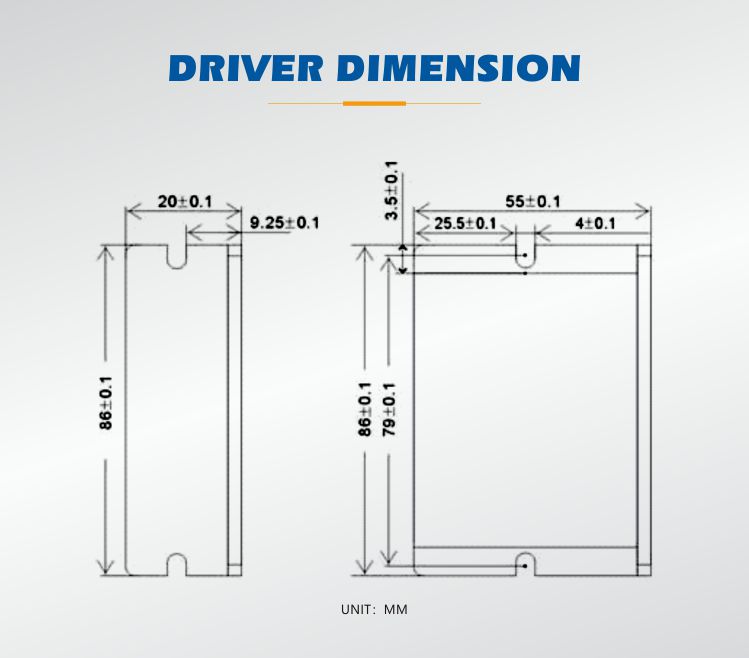
| מימד (מ"מ) | 86*55*20 מ"מ |
| משקל (ק"ג) | 0.1 |
מֵמַד
יישום

אֲרִיזָה

מכשיר ייצור ובדיקה

הסמכה והסמכה

משרד ומפעל

שיתוף פעולה






